![]()
Testing
In this final tutorial we load the weights we trained in the previous tutorial into a static version of the mushroom body model and evaluate its performance on the MNIST test set.
Install PyGeNN wheel from Google Drive
Download wheel file
[1]:
if "google.colab" in str(get_ipython()):
!gdown 128FKTJ1GVF7TgwT9-4o7r4eWqduMYVO4
!pip install pygenn-5.4.0-cp312-cp312-linux_x86_64.whl
%env CUDA_PATH=/usr/local/cuda
Downloading...
From: https://drive.google.com/uc?id=1wUeynMCgEOl2oK2LAd4E0s0iT_OiNOfl
To: /content/pygenn-5.1.0-cp311-cp311-linux_x86_64.whl
100% 8.49M/8.49M [00:00<00:00, 108MB/s]
Processing ./pygenn-5.1.0-cp311-cp311-linux_x86_64.whl
Requirement already satisfied: numpy>=1.17 in /usr/local/lib/python3.11/dist-packages (from pygenn==5.1.0) (2.0.2)
Requirement already satisfied: psutil in /usr/local/lib/python3.11/dist-packages (from pygenn==5.1.0) (5.9.5)
Requirement already satisfied: setuptools in /usr/local/lib/python3.11/dist-packages (from pygenn==5.1.0) (75.1.0)
pygenn is already installed with the same version as the provided wheel. Use --force-reinstall to force an installation of the wheel.
env: CUDA_PATH=/usr/local/cuda
Install MNIST package
[2]:
!pip install mnist
Collecting mnist
Downloading mnist-0.2.2-py2.py3-none-any.whl.metadata (1.6 kB)
Requirement already satisfied: numpy in /usr/local/lib/python3.11/dist-packages (from mnist) (2.0.2)
Downloading mnist-0.2.2-py2.py3-none-any.whl (3.5 kB)
Installing collected packages: mnist
Successfully installed mnist-0.2.2
Build tutorial model
Import modules
[3]:
import mnist
import numpy as np
from copy import copy
from google.colab import drive
from matplotlib import pyplot as plt
from pygenn import (create_current_source_model, create_neuron_model, init_postsynaptic,
init_sparse_connectivity, init_weight_update, GeNNModel)
from pygenn import create_var_ref, create_out_post_var_ref, create_custom_update_model
from tqdm.auto import tqdm
[4]:
# Reshape and normalise training data
mnist.datasets_url = "https://storage.googleapis.com/cvdf-datasets/mnist/"
testing_images = mnist.test_images()
testing_images = np.reshape(testing_images, (testing_images.shape[0], -1)).astype(np.float32)
testing_images /= np.sum(testing_images, axis=1)[:, np.newaxis]
testing_labels = mnist.test_labels()
[5]:
from google.colab import drive
drive.mount("/content/drive")
Mounted at /content/drive
[6]:
pn_kc_ind = np.load("/content/drive/MyDrive/pn_kc_ind.npy")
kc_mbon_g = np.load("/content/drive/MyDrive/kc_mbon_g.npy")
Parameters
Define some model parameters
[7]:
# Simulation time step
DT = 0.1
# Scaling factor for converting normalised image pixels to input currents (nA)
INPUT_SCALE = 80.0
# Number of Projection Neurons in model (should match image size)
NUM_PN = 784
# Number of Kenyon Cells in model (defines memory capacity)
NUM_KC = 20000
# Number of Mushroom Body Output Neurons (should match number of labels)
NUM_MBON = 10
# How long to present each image to model
PRESENT_TIME_MS = 20.0
# Standard LIF neurons parameters
LIF_PARAMS = {
"C": 0.2,
"TauM": 20.0,
"Vrest": -60.0,
"Vreset": -60.0,
"Vthresh": -50.0,
"Ioffset": 0.0,
"TauRefrac": 2.0}
# We only want PNs to spike once
PN_PARAMS = copy(LIF_PARAMS)
PN_PARAMS["TauRefrac"] = 100.0
# Weight of each synaptic connection
PN_KC_WEIGHT = 0.2
# Time constant of synaptic integration
PN_KC_TAU_SYN = 3.0
# How many projection neurons should be connected to each Kenyon Cell
PN_KC_FAN_IN = 20
# Time constant of synaptic integration
KC_MBON_TAU_SYN = 3.0
# We will use weights of 1.0 for KC->GGN connections and
# want the GGN to inhibit the KCs after 200 spikes
GGN_PARAMS = {
"Vthresh": 200.0}
Custom models
As well as the models we defined before:
[8]:
# Current source model, allowing current to be injected into neuron from variable
cs_model = create_current_source_model(
"cs_model",
vars=[("magnitude", "scalar")],
injection_code="injectCurrent(magnitude);")
# Minimal integrate and fire neuron model
if_model = create_neuron_model(
"IF",
params=["Vthresh"],
vars=[("V", "scalar")],
sim_code=
"""
V += Isyn;
""",
threshold_condition_code=
"""
V >= Vthresh
""",
reset_code=
"""
V = 0.0;
""")
Model definition
Create a new model called “mnist_mb_second_layer_gain_control” as before although we no longer need to record spikes from individual neurons:
[9]:
# Create model
model = GeNNModel("float", "mnist_mb_testing")
model.dt = DT
# Create neuron populations
lif_init = {"V": PN_PARAMS["Vreset"], "RefracTime": 0.0}
if_init = {"V": 0.0}
pn = model.add_neuron_population("pn", NUM_PN, "LIF", PN_PARAMS, lif_init)
kc = model.add_neuron_population("kc", NUM_KC, "LIF", LIF_PARAMS, lif_init)
ggn = model.add_neuron_population("ggn", 1, if_model, GGN_PARAMS, if_init)
mbon = model.add_neuron_population("mbon", NUM_MBON, "LIF", LIF_PARAMS, lif_init)
# Turn on spike recording
pn.spike_recording_enabled = True
kc.spike_recording_enabled = True
mbon.spike_recording_enabled = True
# Create current sources to deliver input to network
pn_input = model.add_current_source("pn_input", cs_model, pn , {}, {"magnitude": 0.0})
# Create synapse populations
kc_ggn = model.add_synapse_population("kc_ggn", "DENSE",
kc, ggn,
init_weight_update("StaticPulseConstantWeight", {"g": 1.0}),
init_postsynaptic("DeltaCurr"))
ggn_kc = model.add_synapse_population("ggn_kc", "DENSE",
ggn, kc,
init_weight_update("StaticPulseConstantWeight", {"g": -5.0}),
init_postsynaptic("ExpCurr", {"tau": 5.0}))
[10]:
pn_kc = model.add_synapse_population("pn_kc", "SPARSE",
pn, kc,
init_weight_update("StaticPulseConstantWeight", {"g": PN_KC_WEIGHT}),
init_postsynaptic("ExpCurr", {"tau": PN_KC_TAU_SYN}))
pn_kc.set_sparse_connections(pn_kc_ind[0], pn_kc_ind[1])
[11]:
kc_mbon = model.add_synapse_population("kc_mbon", "DENSE",
kc, mbon,
init_weight_update("StaticPulse", {}, {"g": kc_mbon_g}),
init_postsynaptic("ExpCurr", {"tau": KC_MBON_TAU_SYN}))
Build model
Generate code and load it into PyGeNN (as we’re no longer recording spikes, we don’t need to allocate a recording buffer)
[12]:
# Convert present time into timesteps
present_timesteps = int(round(PRESENT_TIME_MS / DT))
# Define custom update models
reset_neuron_model = create_custom_update_model(
"reset_neuron",
var_refs=[("V", "scalar"), ("RefracTime", "scalar")],
update_code="""
V = -60.0;
RefracTime = 0.0;
""")
reset_neuron_ggn_model = create_custom_update_model(
"reset_neuron_ggn",
var_refs=[("V", "scalar")],
update_code="""
V = -60.0;
""")
reset_synapse_model = create_custom_update_model(
"reset_synapse",
var_refs=[("out_post", "scalar")],
update_code="""
out_post = 0.0;
""")
# Create custom updates
reset_neuron_pn = model.add_custom_update(
"reset_neuron_pn", "reset_group", reset_neuron_model,
var_refs={"V": create_var_ref(pn, "V"), "RefracTime": create_var_ref(pn, "RefracTime")}
)
reset_neuron_kc = model.add_custom_update(
"reset_neuron_kc", "reset_group", reset_neuron_model,
var_refs={"V": create_var_ref(kc, "V"), "RefracTime": create_var_ref(kc, "RefracTime")}
)
reset_neuron_ggn = model.add_custom_update(
"reset_neuron_ggn", "reset_group", reset_neuron_ggn_model,
var_refs={"V": create_var_ref(ggn, "V")}
)
reset_neuron_mbon = model.add_custom_update(
"reset_neuron_mbon", "reset_group", reset_neuron_model,
var_refs={"V": create_var_ref(mbon, "V"), "RefracTime": create_var_ref(mbon, "RefracTime")}
)
reset_synapse_pn_kc = model.add_custom_update(
"reset_synapse_pn_kc", "reset_group", reset_synapse_model,
var_refs={"out_post": create_out_post_var_ref(pn_kc)}
)
reset_synapse_ggn_kc = model.add_custom_update(
"reset_synapse_ggn_kc", "reset_group", reset_synapse_model,
var_refs={"out_post": create_out_post_var_ref(ggn_kc)}
)
reset_synapse_kc_mbon = model.add_custom_update(
"reset_synapse_kc_mbon", "reset_group", reset_synapse_model,
var_refs={"out_post": create_out_post_var_ref(kc_mbon)}
)
# Build model and load it
model.build()
model.load(num_recording_timesteps=present_timesteps)
Simulate tutorial model
As well as resetting the state of every neuron after presenting each stimuli, because we have now added synapses with their own dynamics, these also need to be reset. This function resets neuron state variables selected by the keys of a dictionary to the values specifed in the dictionary values and pushes the new values to the GPU.
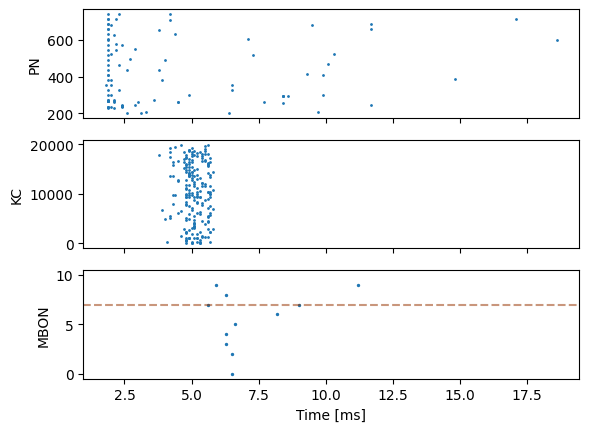
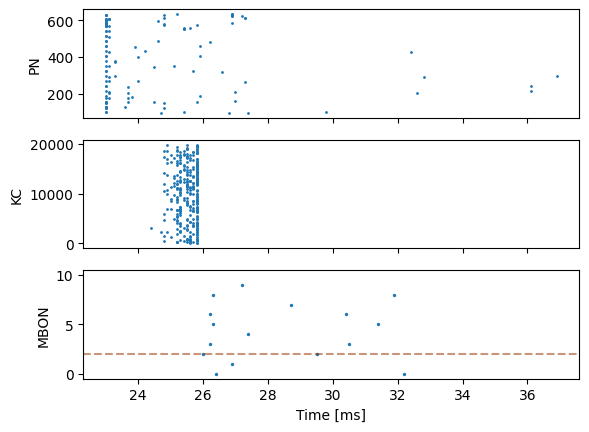
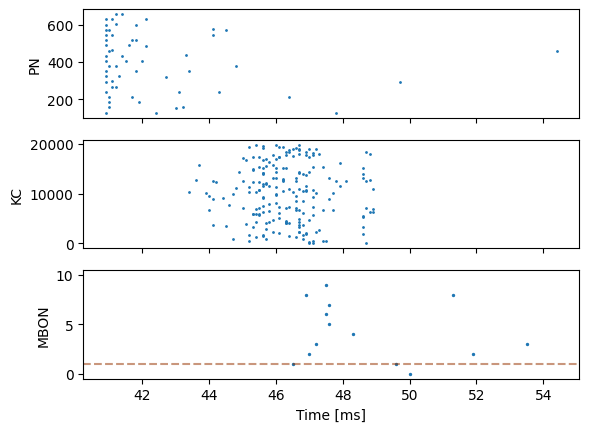
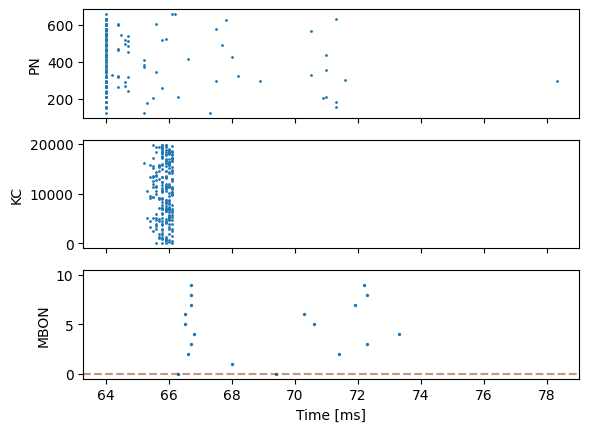
Now, like before, we loop through 4 stimuli and simulate the model. However, now we need to reset the Projection Neuron and Kenyon Cell populations; and the synapses between them. Additionally, we want to show spikes from the Kenyon Cells as well as the Projection Neurons.
[13]:
for s in range(4):
# Set testing image
pn_input.vars["magnitude"].view[:] = testing_images[s] * INPUT_SCALE
pn_input.vars["magnitude"].push_to_device()
# Simulate present timesteps
for i in range(present_timesteps):
model.step_time()
# Reset neuron and synapse state
model.custom_update("reset_group")
# Download spikes from GPU
model.pull_recording_buffers_from_device()
# Plot PN, KC and MBON spikes
fig, axes = plt.subplots(3, sharex=True)
pn_spike_times, pn_spike_ids = pn.spike_recording_data[0]
kc_spike_times, kc_spike_ids = kc.spike_recording_data[0]
mbon_spike_times, mbon_spike_ids = mbon.spike_recording_data[0]
axes[0].scatter(pn_spike_times, pn_spike_ids, s=1)
axes[0].set_ylabel("PN")
axes[1].scatter(kc_spike_times, kc_spike_ids, s=1)
axes[1].set_ylabel("KC")
axes[2].scatter(mbon_spike_times, mbon_spike_ids, s=2)
axes[2].axhline(testing_labels[s], linestyle="--", color="green", alpha=0.3)
axes[2].set_ylim((-0.5, 10.5))
if len(mbon_spike_times) > 0:
classification = mbon_spike_ids[np.argmin(mbon_spike_times)]
axes[2].axhline(classification, linestyle="--", color="red", alpha=0.3)
axes[2].set_ylabel("MBON")
axes[2].set_xlabel("Time [ms]")
[14]:
num_correct = 0
for s in tqdm(range(testing_images.shape[0])):
# Set testing image
pn_input.vars["magnitude"].view[:] = testing_images[s] * INPUT_SCALE
pn_input.vars["magnitude"].push_to_device()
# Simulate present timesteps
for i in range(present_timesteps):
model.step_time()
# Reset neuron and synapse state
model.custom_update("reset_group")
# Download spikes from GPU
model.pull_recording_buffers_from_device();
# Determine the classification and count correct
mbon_spike_times, mbon_spike_ids = mbon.spike_recording_data[0]
if len(mbon_spike_times) > 0:
if mbon_spike_ids[np.argmin(mbon_spike_times)] == testing_labels[s]:
num_correct += 1
print(f"\n{num_correct}/{testing_images.shape[0]} correct ({(num_correct * 100.0) / testing_images.shape[0]} %%)")
7832/10000 correct (78.32 %%)
[ ]: